An up-to-date list is available on Google Scholar.
2023
-
Interaction and Decision Making-aware Motion Planning using Branch Model Predictive Control
In 2023 IEEE Intelligent Vehicles Symposium
Motion planning for autonomous vehicles sharing
the road with human drivers remains challenging. The difficulty
arises from three challenging aspects: human drivers are 1) multimodal, 2) interacting with the autonomous vehicle, and 3) actively
making decisions based on the current state of the traffic scene.
We propose a motion planning framework based on Branch
Model Predictive Control to deal with these challenges. The multimodality is addressed by considering multiple future outcomes
associated with different decisions taken by the human driver.
The interactive nature of humans is considered by modeling them
as reactive agents impacted by the actions of the autonomous
vehicle. Finally, we consider a model developed in human
neuroscience studies as a possible way of encoding the decision
making process of human drivers. We present simulation results
in various scenarios, showing the advantages of the proposed
method and its ability to plan assertive maneuvers that convey
intent to humans.
-
×
![]()
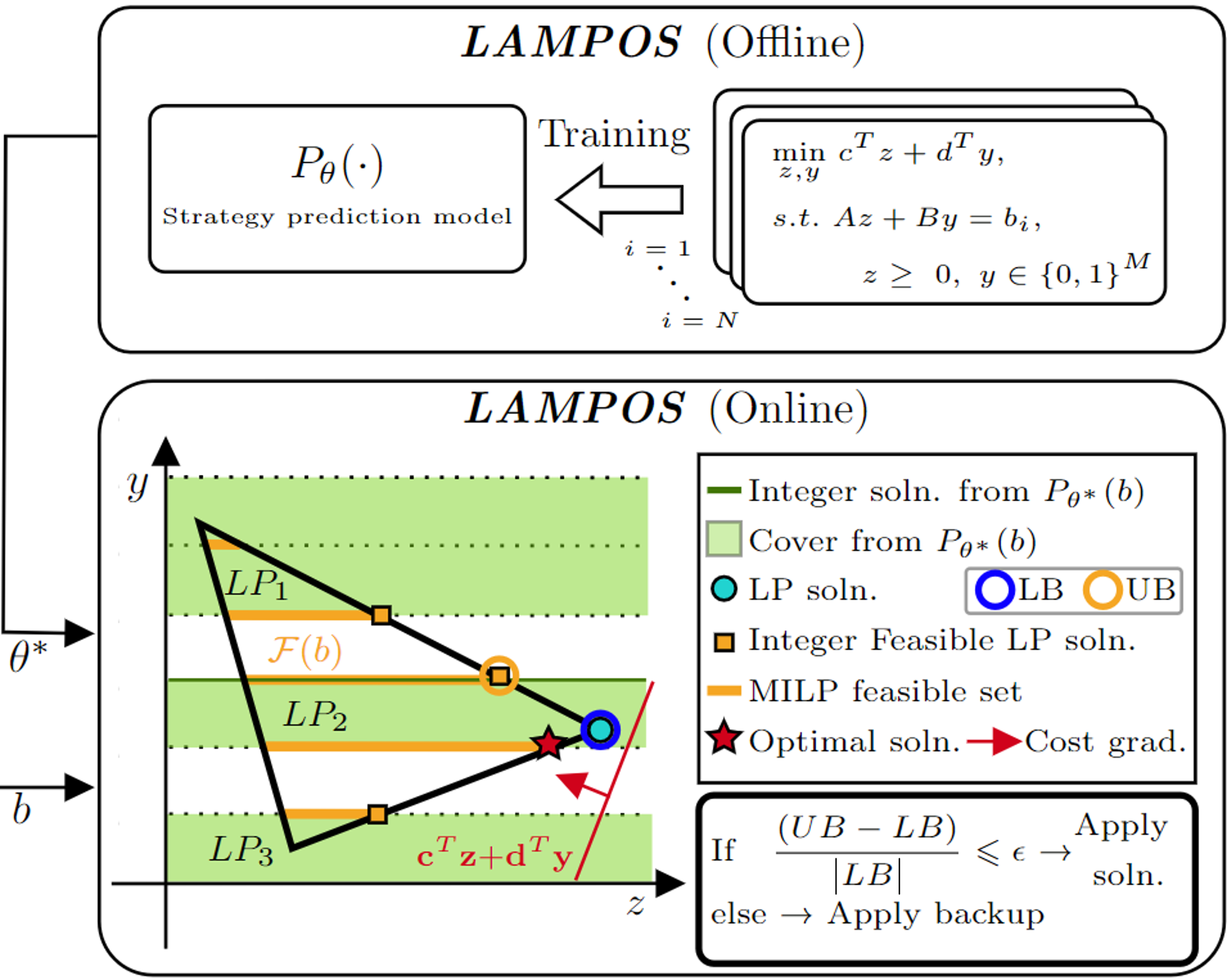
Learning for Online Mixed-Integer Model Predictive Control with Parametric Optimality Certificates
IEEE Control Systems Letters, 2023
We propose a supervised learning framework for computing solutions of multi-parametric Mixed Integer Linear Programs (MILPs) that arise in Model Predictive Control. Our approach also quantifies sub-optimality for the computed solutions. Inspired by Branch-and-Bound techniques, the key idea is to train a Neural Network/Random Forest, which for a given parameter, predicts a strategy consisting of (1) a set of Linear Programs (LPs) such that their feasible sets form a partition of the feasible set of the MILP and (2) a candidate integer solution. For control computation and sub-optimality quantification, we solve a set of LPs online in parallel. We demonstrate our approach for a motion planning example and compare against various commercial and open-source mixed-integer programming solvers.
-
×
![]()
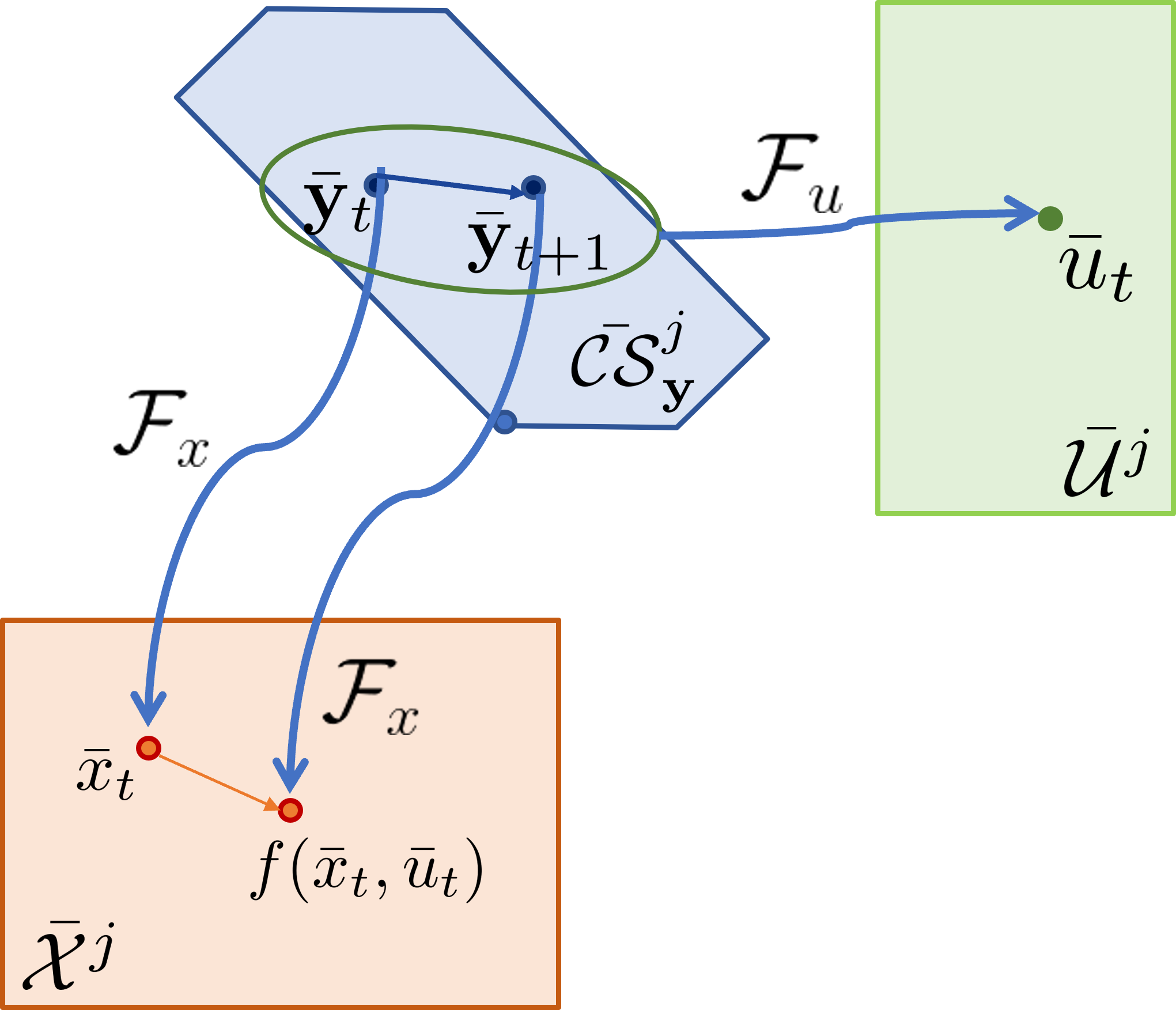
Robust Output-Lifted Learning Model Predictive Control
arXiv preprint arXiv:2303.12127, 2023
We propose an iterative approach for designing Robust Learning Model Predictive Control (LMPC) policies for a class of nonlinear systems with additive, unmodelled dynamics. The nominal dynamics are assumed to be difference flat, i.e., the state and input can be reconstructed using flat output sequences. For the considered class of systems, we synthesize Robust MPC policies and show how to use historical trajectory data collected during iterative tasks to 1) obtain bounds on the unmodelled dynamics and 2) construct a convex value function approximation along with a convex safe set in the space of output sequences for designing terminal components in the Robust MPC design. We show that the proposed strategy guarantees robust constraint satisfaction, asymptotic convergence to a desired subset of the state space, and non-decreasing closed-loop performance at each policy update. Finally, simulation results demonstrate the effectiveness of the proposed strategy on a minimum time control problem using a constrained nonlinear and uncertain vehicle model.
2022
-
Stochastic mpc with multi-modal predictions for traffic intersections
In 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)
We propose an Adaptive MPC framework for
uncertain linear systems to achieve robust satisfaction of state
and input constraints. The uncertainty in the system is assumed
additive, state dependent, and globally Lipschitz with a known
Lipschitz constant. We use a non-parametric technique for
online identification of the system uncertainty by approximating
its graph via envelopes defined by quadratic constraints. At any
given time, by solving a set of convex optimization problems, the
MPC controller guarantees robust constraint satisfaction for the
closed-loop system for all possible values of system uncertainty
modeled by the envelope. The uncertainty envelope is refined
with data using Set Membership Methods. We highlight the
efficacy of the proposed framework via a detailed numerical
example.
-
Collision avoidance for dynamic obstacles with uncertain predictions using model predictive control
In 2022 IEEE 61st Conference on Decision and Control (CDC)
We propose a Model Predictive Control (MPC) for
collision avoidance between an autonomous agent and dynamic
obstacles with uncertain predictions. The collision avoidance
constraints are imposed by enforcing positive distance between
convex sets representing the agent and the obstacles, and
tractably reformulating them using Lagrange duality. This
approach allows for smooth collision avoidance constraints
even for polytopes, which otherwise require mixed-integer
or non-smooth constraints. We consider three widely used
descriptions of the uncertain obstacle position: 1) Arbitrary
distribution with polytopic support, 2) Gaussian distributions
and 3) Arbitrary distribution with first two moments known,
and obtain deterministic reformulations of the collision avoidance constraints. The proposed MPC formulation optimizes
over feedback policies to reduce conservatism in satisfying
the collision avoidance constraints. The proposed approach is
validated using simulations of traffic intersections in CARLA.
-
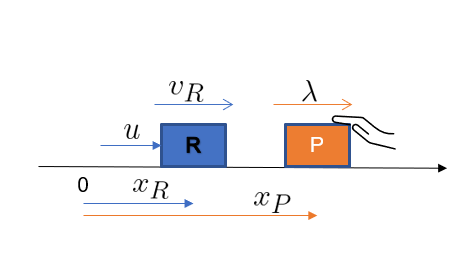
Stochastic mpc with dual control for autonomous driving with multi-modal interaction-aware predictions
In International Symposium on Advanced Vehicle Control (AVEC) , 2022
We propose a Stochastic MPC (SMPC) approach for autonomous driving which incorporates multimodal, interaction-aware predictions of surrounding vehicles. For each mode, vehicle motion predictions are obtained by a control model described using a basis of fixed features with unknown
weights. The proposed SMPC formulation finds optimal controls which serves two purposes: 1)
reducing conservatism of the SMPC by optimizing over parameterized control laws and 2) prediction and estimation of feature weights used in interaction-aware modeling using Kalman filtering.
The proposed approach is demonstrated on a longitudinal control example, with uncertainties in
predictions of the autonomous and surrounding vehicles.
-
×
![]()
Control of Uncertain PWA Systems using Difference-of-Convex Decompositions
2022
In this work, we analyse and design feedback
policies for discrete-time Piecewise-Affine (PWA) systems with
uncertainty in both the affine dynamics and the polytopic partition. The main idea is to utilise the Difference-of-Convex (DC)
decomposition of continuous PWA systems to derive quadratic
Lyapunov functions as stability certificates and stabilizing affine
policies in a higher dimensional space. When projected back
to the state space, we obtain time-varying PWQ Lyapunov
functions and time-varying PWA feedback policies.
2021
-
Output-lifted learning model predictive control
IFAC-PapersOnLine, 2021
We propose a computationally efficient Learning Model Predictive Control (LMPC) scheme for constrained optimal control of a class of nonlinear systems where the state and input can be reconstructed using lifted outputs. For the considered class of systems, we show how to use historical trajectory data collected during iterative tasks to construct a convex value function approximation along with a convex safe set in a lifted space of virtual outputs. These constructions are iteratively updated with historical data and used to synthesize predictive control policies. We show that the proposed strategy guarantees recursive constraint satisfaction, asymptotic stability and non-decreasing closed-loop performance at each policy update. Finally, simulation results demonstrate the effectiveness of the proposed strategy on a piecewise affine (PWA) system, kinematic unicycle and bilinear DC motor.
2020
-
A semi-definite programming approach to robust adaptive MPC under state dependent uncertainty
In 2020 European Control Conference (ECC)
We propose an Adaptive MPC framework for
uncertain linear systems to achieve robust satisfaction of state
and input constraints. The uncertainty in the system is assumed
additive, state dependent, and globally Lipschitz with a known
Lipschitz constant. We use a non-parametric technique for
online identification of the system uncertainty by approximating
its graph via envelopes defined by quadratic constraints. At any
given time, by solving a set of convex optimization problems, the
MPC controller guarantees robust constraint satisfaction for the
closed-loop system for all possible values of system uncertainty
modeled by the envelope. The uncertainty envelope is refined
with data using Set Membership Methods. We highlight the
efficacy of the proposed framework via a detailed numerical
example.
-
Modeling of dynamical systems via successive graph approximations
IFAC-PapersOnLine, 2020
A non-parametric technique for modeling of systems with unknown nonlinear Lipschitz dynamics is presented. The key idea is to successively utilize measurements to approximate the graph of the state-update function of the system dynamics using envelopes described by quadratic constraints. The proposed approach is then used for computing outer approximations of the state-update function using convex optimization. We highlight the efficacy of the proposed approach via a detailed numerical example.
2019
-
×
![]()
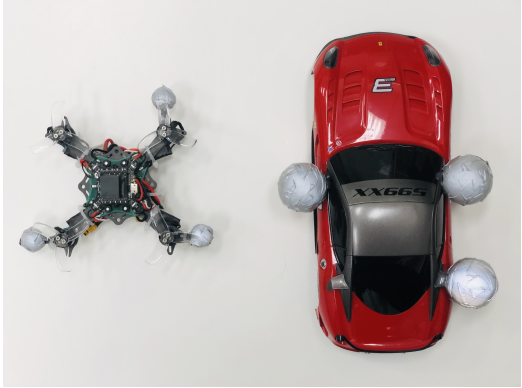
Predictive control for chasing a ground vehicle using a UAV
2019
We propose a high-level planner for a multirotor
to chase a ground vehicle, while simultaneously respecting various state and input constraints. Assuming a minimal kinematic
model for the ground vehicle, we use data collected online to
generate predictions for our planner within a model predictive
control framework. Our solution is demonstrated, both via
simulations and experiments on a stable quadcopter platform.
-
Control synthesis for an underactuated cable suspended system using dynamic decoupling
In 2019 American Control Conference (ACC)
This article studies the dynamics and control of a novel underactuated system: a ball and plate system suspended by a team of quadrotors via cables. The plate is sought to be horizontally stabilized at a certain height, with the ball stabilized at the center of mass of the plate. The freely moving ball adds 2 degrees of underactuation to the system. The design proceeds through a decoupling of the quadrotors and the plate dynamics. Through a partial feedback linearization approach, the attitude of the plate and the translational height of the plate is initially controlled, while maintaining a bounded velocity along the y and x directions. These inputs are then synthesized through the quadrotors with a backstepping and timescale separation argument based on Tikhonov’s theorem.
-
Discrete optimal control of interconnected mechanical systems
11th IFAC Symposium on Nonlinear Control Systems, 2019
2017
-
Hilbert’s space-filling curve for regions with holes
In 2017 IEEE 56th annual Conference on decision and control (CDC)
The paper presents a systematic strategy for implementing Hilbert’s space filling curve for use in online exploration tasks and addresses its application in scenarios wherein the space to be searched obstacles (or holes) whose locations are not known a priori. Using the self-similarity and locality preserving properties of Hilbert’s space filling curve, a set of evasive maneuvers are prescribed and characterized for online implementation. Application of these maneuvers in the case of non-uniform coverage of spaces and for obstacles of varying sizes is also presented. The results are validated with representative simulations demonstrating the deployment of the approach.
-
Attitude control of spacecraft formations subject to distributed communication delays
In 27th AAS/AIAA Space Flight Mechanics Meeting 2017
This paper considers the problem of achieving attitude consensus in spacecraft
formations with bounded, time-varying communication delays between spacecraft
connected as specified by a strongly connected topology. A state feedback controller is proposed and investigated using a time domain approach (via LMIs) and
a frequency domain approach (via the small-gain theorem) to obtain delay dependent stability criteria to achieve the desired consensus. Simulations are presented
to demonstrate the application of the strategy in a specific scenario.